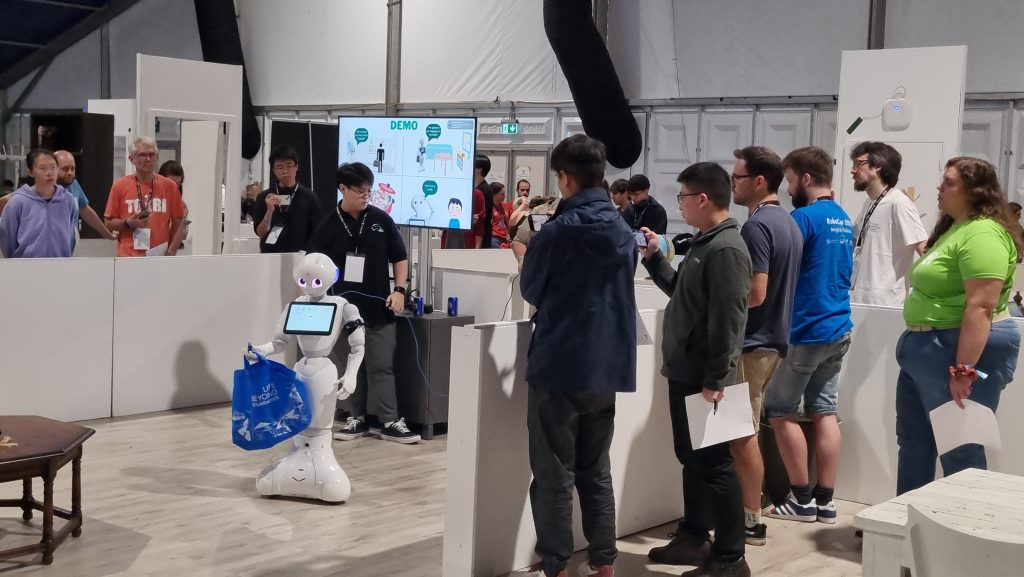
นิสิตคณะวิศวกรรมศาสตร์ ทีม SKUBA คว้ารองแชมป์โลกมาครอง จากการแข่งขันหุ่นยนต์ที่ใหญ่ที่สุดในโลก World RoboCup 2024 ประเภทหุ่นยนต์ใช้งานภายในบ้าน หรือ @Home รุ่น Social Standard Platform League (SSPL) จัดขึ้นระหว่างวันที่ 15 – 22 กรกฎาคม 2567 ณ เมือง Eindhoven ประเทศเนเธอร์แลนด์
สมาชิกทีม SKUBA ประกอบด้วย
นิสิตภาควิชาวิศวกรรมไฟฟ้า ได้แก่ นายภคพล เต็งชาตะพันธ์ (หัวหน้าทีม) นายกันตินันท์ ช่วงรังษี และนายนภณัฏฐ์ ทองตัน (นิสิตปริญญาเอก) นิสิตภาควิชาวิศวกรรมเครื่องกล ได้แก่ นายรัชกร อนันตานานนท์ โดยมี รศ.ดร.กาญจนพันธุ์ สุขวิชชัย เป็นอาจารย์ที่ปรึกษาทีม
การแข่งขันหุ่นยนต์ใช้งานภายในบ้าน @Home เป็นการแข่งขันหุ่นยนต์ใช้งานภายในบ้าน ตามภารกิจต่าง ๆ ที่กำหนดขึ้นแบบอัตโนมัติ เช่น การเตรียมอาหาร จัดห้องครัว เก็บและแยกขยะ รวมถึงการดูแลคนภายในบ้าน โดยในปีนี้มีทีมเข้าร่วมทั้งสิ้น 32 ทีม จาก 19 ประเทศทั่วโลก