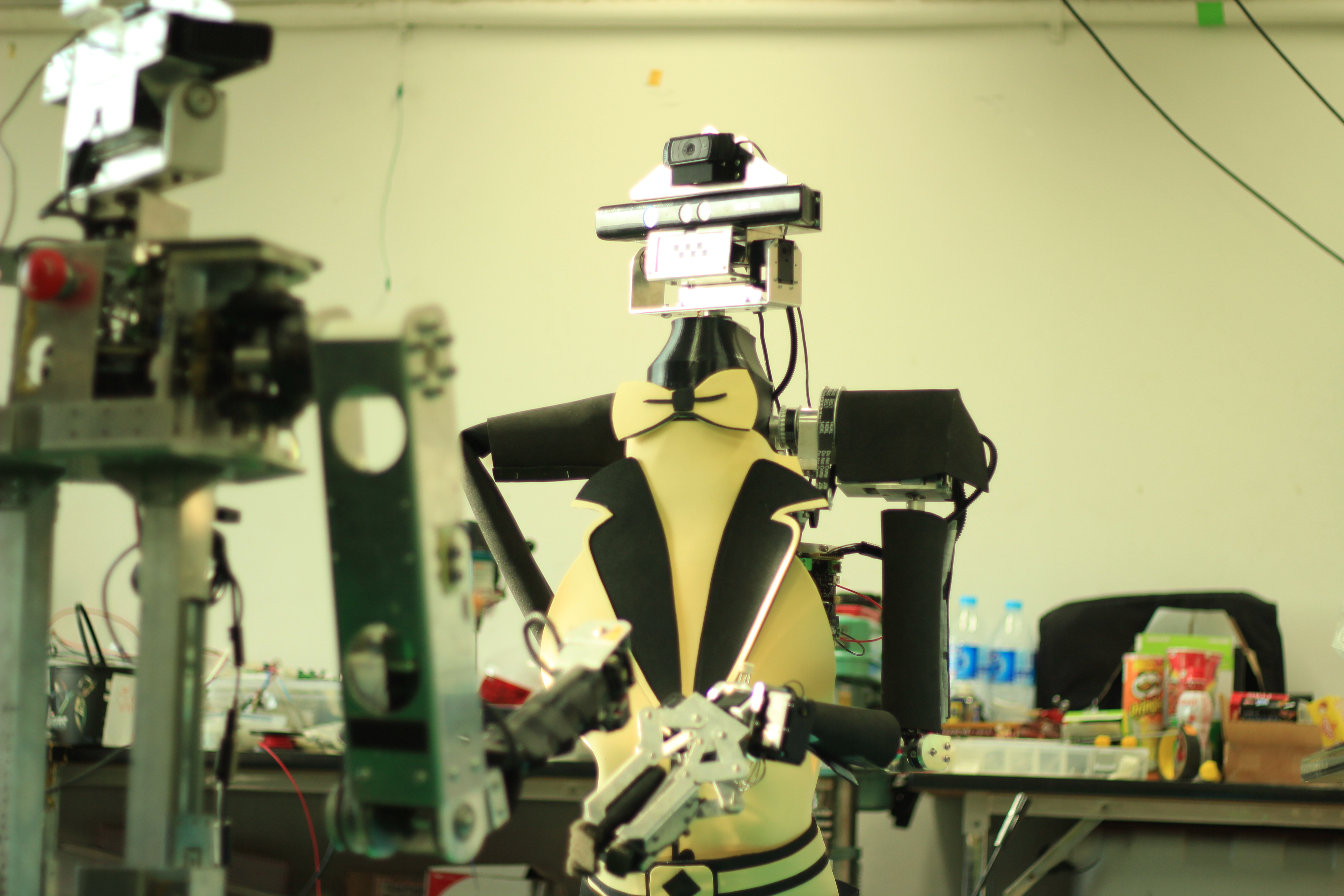
หุ่นยนต์ SKUBA@HOME
ลักษณะการทำงานโดยทั่วไปของหุ่นยนต์ SKUBA@HOME คือ หุ่นยนต์จะเคลื่อนที่ไปยังตำแหน่งที่ผู้ใช้งานต้องการผ่านคำสั่งเสียงหรือภาษามือ โดยหุ่นยนต์จะรับเสียงผู้ใช้งานแล้ว หลังจากนั้นจะนำมาประมวลผลและเคลื่อนที่ไปยังตำแหน่งนั้น ๆ โดยในการเคลื่อนที่ของหุ่นยนต์จะต้องมีการสร้างแผนที่ของบ้านหรือพื้นที่ที่หุ่นยนต์จะต้องเคลื่อนที่เข้าไปไว้ก่อน มีทั้งแบบที่ผู้ใช้สร้างแผนที่ให้และแบบที่หุ่นยนต์สร้างแผนที่ขึ้นเองโดยอัตโนมัติ จากการรวบรวมข้อมูลจากเซ็นเซอร์ที่ใช้วัดระยะเข้ากับข้อมูลการเคลื่อนที่ของล้อ รวมทั้งข้อมูลจากเซ็นเซอร์วัดอัตราเร่งและอัตราการหมุนของหุ่นยนต์รวมเข้าด้วยกันเพื่อหาตำแหน่งของตัวหุ่นยนต์เอง
นอกจากหุ่นยนต์ต้องรู้ตำแหน่งของตัวเองแล้วหุ่นยนต์ยังสามารถสร้างเส้นทางการเคลื่อนที่ไปยังตำแหน่งเป้าหมายได้ โดยใช้วิธีการเคลื่อนที่ที่สั้นที่สุดและหลบเลี่ยงสิ่งกีดขวางได้ดี
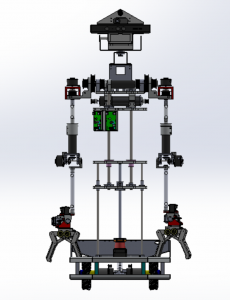
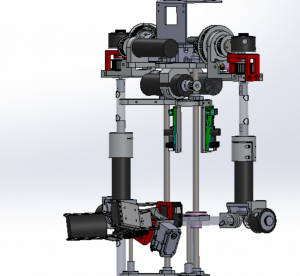
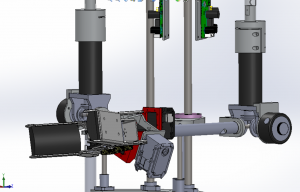
หุ่นยนต์ SKUBA@HOME เป็นหุ่นยนต์ที่ออกแบบขึ้น เพื่อตอบสนองการทำงานพื้นฐานโดยมีองค์ประกอบสำคัญ 3 ส่วน คือ
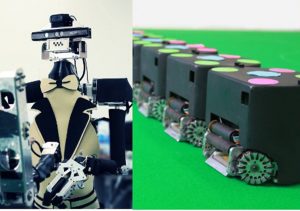
- ฐานหุ่นยนต์ ฐานหุ่นยนต์ใช้สำหรับเคลื่อนที่ โดยมีล้อที่เรียกว่า Mecanum Wheel มีคุณสมบัติในการหลบหลีกสิ่งกีดขวาง ทำงานได้อย่างรวดเร็ว เคลื่อนที่ได้หลายทิศทาง มีความยึดเกาะพื้นสูง รวมทั้งยังสามารถเคลื่อนที่ผ่านอุปสรรคบนพื้นได้ง่าย
- ลำตัวข้อหุ่นยนต์ สามาถรเคลื่อนที่ขึ้นลงได้ เพื่อทำให้หุ่นยนต์สามารถย่อและยืดตัว เพื่อมองหรือหยิบวัตถุที่สนใจได้
- แขนหุ่นยนต์ หรือ Manipulator เป็นส่วนสำคัญการหยิบจับของ สามารถหมุนได้ง่าย และติดอยู่กลางลำตัวของหุ่นยนต์
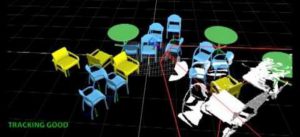
การหยิบจับวัตถุด้วยแขนของหุ่นยนต์ SKUBA@HOME นั้น หุ่นยนต์สามารถแยกแยะวัตถุที่ต้องการหยิบออกจากวัตถุอื่น ๆ รวมทั้งสามารถสั่งแขนกลให้เคลื่อนที่ไปหยิบวัตถุนั้นโดยไม่โดนวัตถุอื่น ๆ หรือสิ่งของภายในบ้านได้ โดยเกิดจากการสร้างโปรแกรมที่ใช้ในการแยกแยะวัตถุ โดยทางกลุ่มวิจัย SKUBA ได้ใช้เทคนิคแยกวัตถุโดยใช้กลุ่มภาพสามมิติ หรือ 3D Point Cloud ในการแยกวัตถุชนิดต่าง ๆ ออกจากกัน ผ่านทางกล้อง Kinect โดยวัตถุในภาพจะถูกทำการแปลงตำแหน่งปฏิภูมิ (Coordinate) จากกล้องมายังแขนหุ่นยนต์
สำหรับแขนหุ่นยนต์ SKUBA@HOME นั้น ใช้เทคนิค Individual Joint Control คือ ในแต่ละข้อต่อสามารถควบคุมองศาแบบอิสระต่อกัน และมีการส่งสัญญาณกันแบบมาตรฐาน RS-485 ที่ใช้กันอย่างกว้างขวางในโรงงานอุตสาหกรรม ส่วนสุดท้ายที่ใช้ในการควบคุมการทำงานของโปรแกรมแต่ละส่วนให้สามารถทำงานสอดคล้องได้ (Synchronize) คือ โปรแกรม Finite State Machine ที่กลุ่มวิจัย SKUBA ได้พัฒนาขึ้นเอง ผ่านระบปฏิบัติการหุ่นยนต์ ROS (Robot Operating System) เพื่อให้แต่ละโมดูลทำงานและส่งข้อมูลหากันได้อย่างราบรื่น
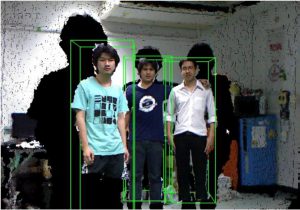
ในการมองเห็นของหุ่นยนต์ SKUBA@HOME นั้น ได้ติดตั้งกล้อง 3 มิติ ซึ่งเป็นกล้องที่มีลักษณะเลียนแบบการมองเห็นคนทั่วไป ซึ่งจะช่วยในการค้นหาผู้ใช้งาน การจดจำใบหน้า การแยกแยะบุคคล การเดินตามผู้ใช้ รวมถึงการค้นหาและจำแนกของต่าง ๆ ภายในบ้าน โดยใช้กล้อง 2 ตัวติดตั้งให้ขนานกันเพื่อเลียนแบบดวงตาของมนุษย์ หลังจากได้ภาพจากกล้องทั้ง 2 ตัว แล้วจะนำมาประมวลผลโดยใช้สมการเพื่อสร้างภาพ 3 มิติเสมือน เช่นเดียวกับการประมวลผลภาพโดยใช้สมองของมนุษย์
นอกจากส่วนสำคัญต่าง ๆ แล้ว SKUBA@HOME ยังประกอบด้วยระบบการทำงานต่าง ๆ คือ ระบบเซนเซอร์ ระบบแปลงแกน ระบบจำลองการทำงาน ระบบตรวจสอบข้อผิดพลาด ระบบนำร่องและหาตำแหน่ง ระบบจำแนกคำสั่งเสียง ระบบตรวจจับการโบกมือ ระบบจดจำวัตถุ ระบบแขนกล ระบบตรวจจับบุคคล ระบบตรวจจับเฟอร์นิเจอร์ ระบบฐานข้อมูล ระบบตัดสินใจและวางแผน อีกด้วย
ล่าสุด SKUBA@HOME ได้เข้าร่วมเป็นหนึ่งในหุ่นยนต์รับใช้งานบ้านที่เข้าร่วมประกวด Japan RoboCup Open 2015 ณ ประเทศญี่ปุ่น จากการเข้าร่วมแข่งขันครั้งนั้น ทำให้ทีมวิจัย SKUBA ได้ทราบถึงแนวทางพัฒนาและต่อยอดหุ่นยนต์ให้มีความสามารถมากยิ่งขึ่น เพื่อเป้าหมายการแข่งขันในรอบสุดท้ายระดับโลกต่อไป