ในโรงงานอุตสาหกรรมต่างๆ ทุกวันนี้ มีการนำหุ่นยนต์มาใช้ในการทำงานทดแทนแรงงานคนในหลายด้าน เนื่องจากหุ่นยนต์สามารถทำงานแบบซ้ำๆ กันอย่างต่อเนื่องได้เป็นระยะเวลานาน รวมทั้งมีความรวดเร็วและถูกต้องแม่นยำสูง ทำให้ผลผลิตเพิ่มขึ้น คุ้มค่าแก่การลงทุน แต่นอกเหนือจากหุ่นยนต์ทำงานในภาคอุตสาหกรรมแล้ว ยังมีหุ่นยนต์อีกประเภทหนึ่งที่ในอนาคตมีแนวโน้มความต้องการใช้งานมากขึ้น คือ หุ่นยนต์ที่ใช้สำหรับช่วยเหลือการทำงานของมนุษย์ ซึ่งคุณสมบัติหุ่นยนต์ที่ใช้ในภาคอุตสาหกรรมยังไม่เหมาะที่จะนำมาใช้งานกับมนุษย์ได้อย่างเต็มที่
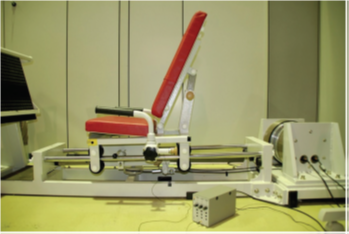
ด้วยเหตุนี้เอง อาจารย์ ดร.เชาวลิต มิตรสันติสุข อาจารย์ประจำภาควิชาวิศวกรรมไฟฟ้า คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเกษตรศาสตร์ (มก.) จึงได้ทำการศึกษา วิจัยและพัฒนาระบบควบคุมที่สามารถนำมาประยุกต์ใช้งานเพื่อให้หุ่นยนต์ทำงานร่วมกับมนุษย์ได้ เช่น หุ่นยนต์ช่วยทำกายภาพบำบัดช่วงขา หรือ อุปกรณ์ช่วยการผ่าตัดทางการแพทย์ เป็นต้น ในโครงการวิจัยระบบควบคุมแรงสัมผัสอัจฉริยะ เพื่อช่วยการทำงานระหว่างมนุษย์และหุ่นยนต์ โดยไม่จำเป็นต้องใช้ Force Sensor โดยโครงการนี้ได้รับรางวัลซิว กาญจนจารี เพื่อวิศวกรรมฟ้า ประจำปี พ.ศ. 2556 เมื่อเดือนธันวาคม 2556 ที่ผ่านมา
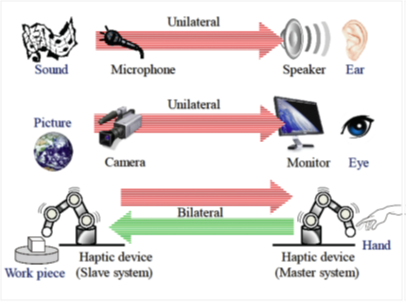
อาจารย์ ดร.เชาวลิต เล่าว่า “ปัจจุบันได้มีการนำเทคโนโลยีมัลติมีเดียมาใช้งานอย่างแพร่หลาย ในการบันทึกประสบการณ์ที่ได้รับจากการฟังหรือการมองเห็น และส่งผ่านข้อมูลไปให้ผู้ใช้งาน ซึ่งเป็นการส่งข้อมูลทางเดียว แต่การส่งผ่านข้อมูลที่ได้มาจากประสบการณ์การสัมผัส จะเป็นการส่งผ่านข้อมูลความซับซ้อนมากขึ้น เป็นการส่งข้อมูลสองทาง เนื่องจากจะมีทั้งแรงกระทำกับวัตถุ และแรงเสมือนที่ถูกป้อนเข้ามา และจากความยากในการส่งผ่านข้อมูลสองทางนี่เอง ทำให้เกิดระบบควบคุมสองทางขึ้น โดยระบบควบคุมดังกล่าวสามารถนำมาประยุกต์ใช้งานเพื่อให้หุ่นยนต์เข้าไปทำงานแทนที่มนุษย์ได้ดี ในเขตพื้นที่อันตราย เสี่ยงภัย รวมทั้งพื้นที่ขนาดเล็กยากที่เข้าถึงได้ยาก
ระบบควบคุมสองทาง มีพื้นฐานการพัฒนามาจากเซ็นเซอร์วัดแรง (Force Sensor) ทั้งสิ้น แต่เซ็นเซอร์วัดแรง มีช่วงความถี่ที่ไม่สูงมากนักและยังมีสัญญาณเข้ามารบกวนในระบบควบคุม จึงทำให้ประสิทธิภาพของระบบควบคุมทั้งสองทางไม่เพียงพอต่อการนำมาใช้งานบางประเภทที่ต้องการการส่งผ่านแรงป้อนกลับที่มีความถูกต้องและมีความถี่สูง โดยปกติเซ็นเซอร์วัดแรงจะนำมาใช้เพื่อวัดหาค่าแรงที่ถูกกระทำ แต่การนำเซ็นเซอร์วัดแรงมาใช้นั้น มีข้อเสีย เช่น ช่วงความถี่ของเซ็นเซอร์ไม่สูง มีสัญญาณรบกวน และสามารถวัดแรงได้เฉพาะจุด เป็นต้น”
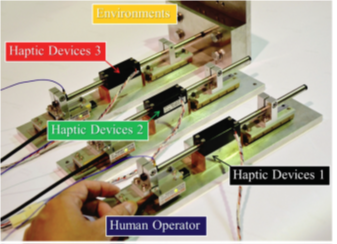
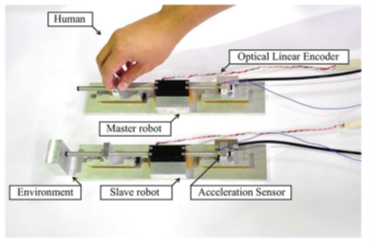
ผลงานวิจัย ระบบควบคุมแรงสัมผัสอัจฉริยะ เพื่อช่วยการทำงานระหว่างมนุษย์และหุ่นยนต์ โดยไม่จำเป็นต้องใช้ Force Sensor ที่ อาจารย์ ดร.เชาวลิตได้พัฒนาขึ้นนี้ เป็นวิธีการประมาณค่าแรงและโครงสร้างของระบบควบคุมทั้งสองทางแบบใหม่ ที่สามารถส่งผ่านแรงเสมือนไปยังมือของผู้ใช้งานได้อย่างดีเยี่ยม มีผลการตอบสนองที่รวดเร็วสูง และดีกว่าการประมาณค่าแบบเก่า โดยเฉพาะอย่างยิ่งในช่วงที่หุ่นยนต์สัมผัสที่กระทบกับวัตถุนั้น ค่าแรงที่กระทำและแรงเสมือนสะท้อนกลับมีค่าออกมาที่เท่ากันในทิศทางตรงกันข้าม เนื่องจากว่าเซนเซอร์ความเร่งจะช่วยเพิ่มย่านความถี่ของการประมาณค่าแรงสัมผัสที่ดีขึ้น การเคลื่อนที่ของหุ่นยนต์ทั้งสองตัวนั้นมีผลตอบสนองของตำแหน่งที่เท่ากัน และทิศทางเดียวกัน จึงสามารถสรุปได้ว่าการออกแบบระบบควบคุม ออกแบบได้ง่าย และเป็นไปตามเป้าหมายที่วางเอาไว้
ระบบควบคุมดังกล่าวสามารถนำมาประยุกต์ใช้ในงานได้หลากหลาย เช่น ด้านการแพทย์ สามารถนำไปประยุกต์ใช้กับเครื่องมือผ่าตัดของแพทย์ ทำให้สามารถการผ่าตัดมีความปลอดภัยมากยิ่งขึ้น หรือใช้ในงานหุ่นยนต์ช่วยทำกายภาพบำบัดช่วงขา ตลอดจนนำมาใช้ในการออกแบบระบบการเรียนการสอนผ่านประสบการณ์แรงระหว่างอาจารย์และลูกศิษย์ ด้านอุตสาหกรรม เช่น การควบคุมแรงป้อนกับในหุ่นยนต์ในอุตสาหกรรมโดยไม่จำเป็นต้องใช้เซนเซอร์แรง การจำลองแรงเสมือนป้อนกลับของผลิตภัณฑ์เพื่อใช้ในการโฆษณาของสินค้า หรือการนำหุ่นยนต์เข้าไปแทนที่การทำงานของมนุษย์ในเขตพื้นที่อันตรายได้ และเนื่องจากว่าระบบควบคุมนี้ไม่มีความจำเป็นต้องใช้เซนเซอร์วัดแรง ทำให้ลดต้นทุนในการออกแบบหุ่นยนต์ได้อีกด้วย