
เจาะลึกนิสิตวิศวฯกับการสร้างหุ่นยนต์นักเตะบอลวิ่งเร็วที่สุดในโลก
ถึงวันนี้ชื่อทีม SKUBA ทีมนิสิตวิศวฯ คนเก่งได้เป็นที่รู้จักและยอมรับในความสามารถจากการแข่งขันหุ่นยนต์เตะฟุตบอลระดับโลก ในฐานะทีมม้ามืดจากประเทศไทยทีสามารถเอาชนะทีมคู่แข่งซึ่งเป็นตัวเก็งครั้งนี้ คือประเทศญี่ปุ่นและประเทศสาธารณรัฐประชาชนจีนได้ในการแข่งขัน World RoboCup 2008 ที่จัดขึ้น ณ ประเทศสาธารณรัฐประชาชนจีนเมื่อเดือนกรกฎาคม 2551 ที่ผ่านมา ซึ่งนอกจากการคว้ารางวัลที่ 2 ในประเภทเทคนิกยอดเยี่ยมและรางวัลที่ 3 แล้ว อีกสิ่งหนึ่งที่ทีม SKUBA ได้ทำให้คนทั่วโลกได้รู้จักพวกเขาและประเทศไทยมากขึ้น ก็คือ หุ่นยนต์ที่พวกเขาสร้างขึ้นเพื่อเข้าแข่งขันนั้นเป็นหุ่นยนต์นักเตะที่วิ่งได้เร็วที่สุดในโลก วันนี้ข่าววิศวกรรมศาสตร์จะเจาะลึกเรื่องราวการสร้างหุ่นยนต์ของทีมนิสิตคนเก่งทีมนี้ ทีมที่เกิดจากจุดเริ่มต้นที่ไม่มีใครรู้จัก ก่อนก้าวสู่ทีมลำดับที่ 3 ในสนามการแข่งขันฟุตบอลหุ่นยนต์ระดับโลก …..
ทีม SKUBA ประกอบด้วยนิสิตวิศวฯ หลายสาขาวิชา ใช้ความรู้ด้านต่างๆ ร่วมกันสร้างหุ่นยนต์นักเตะบอลให้มีความสามารถในการเตะบอลให้มากที่สุด แรงบันดาลใจมาจากความชอบหุ่นยนต์และกีฬาฟุตบอลของนิสิตทีมนี้ทำให้ทีม SKUBA ได้สร้างหุ่นยนต์และผ่านการแข่งขันมาหลายสนาม ประสบการณ์จากแต่ละสนามนำมาซึ่งการปรับปรุง พัฒนาหุ่นยนต์ให้มีความสามารถเพิ่มขึ้นเรื่อยๆ จนถึงการเป็นหุ่นยนต์นักเตะระดับโลก
นายปิยเมษฐ์ วสุนทพิชัยกุล สมาชิกในทีม SKUBA กล่าวว่า “การคว้ารองชนะเลิศที่ประเทศไทย และเข้าร่วมการแข่งขันระดับโลกที่เมืองจีนมีความแตกต่างกันมาก ซึ่งการแข่งขันที่เมืองจีนนับเป็นงานใหญ่สำหรับทีมหน้าใหม่อย่างทีม SKUBA ทำให้เราต้องพัฒนาหุ่นยนต์นักเตะให้มีความสามารถมากยิ่งขึ้น โดยใช้งบประมาณในการพัฒนาหุ่นยนต์เพียง 5 แสนบาท และมีจำนวนหุ่นลงแข่ง 5 ตัว และหุ่นสำรองเพียง 1 ตัว ในขณะที่ทีมอื่นๆใช้งบประมาณมากกว่า 2 ล้านบาทและมีจำนวนหุ่นยนต์มากกว่า 10 ตัว และจากงบเพียง 5 แสนบาททางทีม SKUBA ได้ใช้งบประมาณที่มีอยู่ให้คุ้มค่ามากที่สุด ด้วยการออกแบบสร้างหุ่นยนต์โดยพัฒนาและปรับปรุงแก้ไขจากหุ่นยนต์ตัวเดิมที่มีอยู่พร้อมกับการสร้างแผงวงจรทุกๆ ส่วนขึ้นมาใหม่ ให้มีความสามารถมากขึ้นเมื่อเทียบกับหุ่นยนต์ตัวเดิม โดยเฉพาะในด้าน Electronics ในส่วนแผงวงจรที่ทำงานได้อย่างมีประสิทธิภาพสูงมาก เนื่องจากไม่มีอุปกรณ์ชิ้นใดเกิดการชำรุดเสียหายภายหลังการแข่งขันเลย”
“สำหรับในส่วนการออกแบบ Mechanics หรือส่วนเครื่องจักรในตัวหุ่นยนต์ ได้มีการเปลี่ยนมอเตอร์ให้มีกำลังมากขึ้นและได้มีการใช้ Proportional–Integral–Derivative Controller (PID Controller) ควบคุมความเร็วรอบของมอเตอร์ โดยในการแข่งขันประเภทเทคนิคยอดเยี่ยม หุ่นยนต์นักเตะทีม SKUBA สามารถวิ่งอ้อมหลักที่ตั้งไว้ ได้จำนวนรอบวิ่งมากที่สุด ภายในเวลา 2 นาที จึงนับว่าเป็นหุ่นยนต์ที่วิ่งได้เร็วที่สุดในโลก นอกจากนั้นทางทีมยังได้พัฒนาความแรงในการยิงลูก ด้วยการออกแบบระยะวิ่งของแกนกระทุ้งก่อนที่จะวิ่งมาชนลูกบอลและวิธีการพัดขดลวดของแกนโซลินอย (Solenoid) ซึ่งอาศัยแรงทางแม่เหล็กไฟฟ้าในการผลักแท่งเหล็กไปชนลูกบอลจากที่ทำได้เพียง 7.5 เมตรต่อวินาที มีการพัฒนาเป็น 11.7 เมตรต่อวินาที แต่กฎของการแข่งขันจำกัดให้เพียง 10 เมตรต่อวินาทีเท่านั้น” นายภัคชนม์ หุ่นสุวรรณ์ อีกหนึ่งในทีมงานกล่าวเสริม
นอกเหนือจากส่วน Electronics และ Mechanics ที่ทำให้การแข่งขันครั้งนี้เป็นการแข่งขันที่มีทั้งความตื่นเต้นและสนุกสนานไม่แพ้การแข่งขันฟุตบอลในสนามจริง สิ่งหนึ่งที่นับได้ว่าเป็นหัวใจหลักของการแข่งขันหุ่นยนต์เตะฟุตบอล คือ การสร้างสมองให้กับหุ่นยนต์สามารถตัดสินใจได้เองในระหว่างการแข่งขัน นั่นคือ ความสามารถในการ
เขียนโปรแกรม AI (Artificial Intelligence) ซึ่งประกอบด้วย 3 ส่วนสำคัญ คือ ส่วน Vision ที่เปรียบเสมือนเป็นตาของหุ่นยนต์ Strategy คือส่วนของการวางแผนการเล่น และส่วน Control หรือส่วนที่ควบคุมหุ่นยนต์
นายพิพัฒน์ เตมียวณิชย์ สมาชิกทีมผู้ดูแลระบบ Vision ของหุ่นยนต์ กล่าวว่า “ระบบ Vision จะทำการวิเคราะห์ภาพเพื่อให้รู้ว่าในสนามมีลูกบอลหรือหุ่นยนต์อยู่ตำแหน่งใด การที่จะทำให้ระบบ Vision วิเคราะห์ภาพได้นั้นต้องผ่านการเทียบให้สนามที่คอมพิวเตอร์เห็นกับสนามจริงตรงกัน (Calibrate) โดยใช้กล้อง AVT ในการจับภาพ ซึ่งติดตั้งไว้ด้านบนสูงจากสนาม ประมาณ 4 เมตร แล้วส่งภาพที่ได้มายังคอมพิวเตอร์ เพื่อเลือกว่าจะส่งการให้หุ่นยนต์เคลื่อนไหวหรือแก้เกมอย่างไร เป็นงานที่ต้องใช้สมาธิสูงมาก โดยในส่วนของการพัฒนาซอฟต์แวร์ในตัวหุ่นยนต์ที่ใช้ในการติดต่อกับผู้ใช้นั้น ได้มีการพัฒนา จากเมื่อก่อนที่ต้องถอดชิพ (Chip) ออกไปโปรแกรมหุ่นยนต์ใหม่ ได้มีการพัฒนาให้ผู้ใช้งานสามารถเข้าไปปรับแต่งค่าตัวแปรหรือตั้งโปรแกรมใหม่ให้หุ่นยนต์ได้เลยโดยไม่ต้องถอดชิพออกมาจากตัวหุ่น
ส่วนที่เหลือก็คือ Strategy และ Control คือ เมื่อได้รับข้อมูลจากระบบ Vision แล้วจะคิดแผนการเล่นโดยมีการกำหนด Skill หรือทักษะการเล่นบอลให้กับหุ่นทุกตัวว่าหุ่นตัวไหนควรจะรับหน้าที่อะไร เช่น หุ่นตัวไหนใกล้ลูกบอลมากที่สุด ก็ควรจะเป็นตัวเล่นเพราะสามารถเข้าถึงลูกบอลได้มากที่สุด หลังจากประมวลผลเรียบร้อยแล้วหุ่นแต่ละตัวจะมีจุดหมายของหุ่นเอง และจุดหมายนี้จะถูกส่งต่อไปให้ ระบบ Control ซึ่งเป็นระบบที่ควบคุมในหุ่นยนต์ให้ทำตาม เช่น การกำหนดเส้นทางให้หุ่นยนต์เดิน การวิ่งไปตามทางที่วางไว้ พร้อมทั้งการส่งสัญญาณให้หุ่นยนต์แต่ละตัวทำตามด้วย”
นอกเหนือสมาชิกทั้งสามคน แล้ว ทีม SKUBA ยังประกอบด้วยนิสิตหลากหลายชั้นปี ด้วย ได้แก่ นายศรันย์ บวรกิติวงศ์ นายชานน อ่อนมั่น นายรัชชัย ดำเนินกิตติกุล นายภาณุภักดิ์ หนุนภักดี นายศุภรัฐ ดำยศ นายพีรพล เวชสุวรรณมณี และนายจิรัฏฐ์ ศรีสบาย ปัจจุบันสมาชิกในทีมบางคนได้สำเร็จการศึกษาไปแล้ว และบางคนกำลังศึกษาต่อในระดับปริญญาโท ณ คณะวิศวกรรมศาสตร์ ม.เกษตร
แม้ว่าหุ่นยนต์จะเก่งแค่ไหน ทีสุดของความเก่งนั้นคือ กระบวนการคิด พัฒนาและสร้างหุ่นยนต์ขึ้นมาของมนุษย์นั่นเอง และจากจุดเริ่มต้นเล็กๆ ค่อยๆ เรียนรู้และพัฒนา รวมทั้งการสั่งสมประสบการณ์จากสนามการแข่งขันต่างๆ ของนิสิตวิศวฯ ทีม SKUBA ที่มีความพยายามและตั้งใจที่จะพัฒนาหุ่นยนต์นักเตะฟุตบอลนั้น นำมาซึ่งการสนับสนุนงบประมาณ จำนวน 1.33 ล้านบาทของมหาวิทยาลัยเกษตรศาสตร์ เพื่อใช้ในการพัฒนาหุ่นยนต์เตะฟุตบอลเพื่อเข้าร่วมการแข่งขัน World RoboCup 2009 ที่จะจัดขึ้น ณ เมือง Graz ประเทศออสเตรีย ในปี 2552 ที่จะถึงนี้ด้วย…

ทีม SKUBA ขณะประกอบหุ่นยนต์เพื่อเตรียมพร้อมลงสนามแข่งขัน



บรรยากาศระหว่างการแข่งขัน




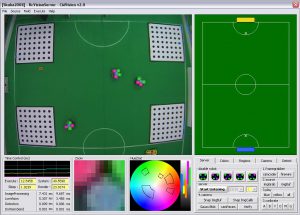
ภาพแสดงซอฟต์แวร์ส่วน Image Processing ของทีม SKUBA
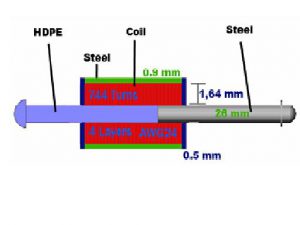
ภาพตัดระบบ Solenoid ที่ใช้ในชุดยิงและยกลูกบอลของหุ่นยนต์











