WOW Project Engineering New Gen 2015
- ยานดำน้ำขับเคลื่อนอัตโนมัติ
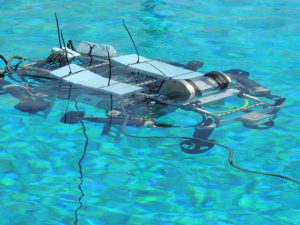
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.ยอดเยี่ยม ทิพย์สุวรรณ์ ภาควิชาวิศวกรรมคอมพิวเตอร์
ยานดำน้ำขับเคลื่อนอัตโนมัติ เป็นหุ่นยนต์อัจฉริยะทำงานด้วยมอเตอร์ 8 ตัว สามารถปรับทิศทางการเคลื่อนไหว เดินหน้าถอยหลัง หันซ้ายหันขวาได้ และทำงานใน 2 รูปแบบคือ การบังคับด้วยมือ หรือ ROV โดยสั่งงานผ่านเครือข่าย LAN ให้ทำสิ่งต่างๆ เช่น หยิบจับสิ่งของและการทำงานแบบอัตโนมัติ หรือ AUV ซึ่งมีการใช้เซ็นเซอร์ เครื่องโซนาร์ ระบบประมวลผลและตรวจจับ เพื่อให้สามารถเคลื่อนไหวตามทิศทางที่กำหนดอย่างแม่นยำ ได้พัฒนาต่อยอดจากเดิม เพิ่มความสามารถด้านเซ็นเซอร์สำหรับระบบนำร่อง การสำรวจน้ำมัน ท่อขุดเจาะโซนาร์ รวมถึงเซ็นเซอร์สำรวจพื้นผิวใต้น้ำ และเซนเซอร์ดมกลิ่นก๊าซใต้น้ำ - รองเท้าเสริมแรง
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.พงศ์ธร พรหมบุตร อาจารย์ ดร.อรรถพร วิเศษสิทธุ์ อาจารย์ ดร.กรรมมันต์ ชูประเสริฐ และอาจารย์ชาญเวช ศีลพิพัฒน์ ภาควิชาวิศวกรรมเครื่องกล
รองเท้าเสริมแรง เป็นขาต่อสปริงที่เพิ่มความสามารถในการเคลื่อนที่ของคนโดยไม่ต้องอาศัยพลังงานจากภายนอกทำให้เดินทานได้ระยะทางมากขึ้น ลดความเหนื่อยล้าสำหรับการเดินทางในป่าหรือพื้นที่ทุรกันดาร รวมทั้งการใช้รองเท้าเสริมแรงในการออกกำลังกาย เพื่อลดการกระแทกที่จะเกิดขึ้นกับข้อต่อต่างๆ ของร่างกาย ตลอดจนช่วยในการเดินสำหรับผู้ป่วยกล้ามเนื้ออ่อนแรงหรืออัมพาตท่อนล่างได้อีกด้วย โดยการออกแบบใกล้เคียงกับรองเท้าบูทปกติ โดยยกสูงจากพื้น 30 เซนติเมตร สามารถเปลี่ยนพื้นสัมผัสได้ เพื่อให้ความเหมาะสมกับพื้นที่ต่างๆ เช่น พื้นดิน พื้นหินกรวด หรือภูเขาหิน เป็นต้น โดยใช้ขาต่อที่มีระบบสปริงที่ทำให้คนทั่วไปกระโดดสูงได้ถึง 5 เมตร จากพื้น หรือวิ่งได้ด้วยความเร็ว 30 กิโลเมตรต่อชั่วโมง - ประชากรหุ่นยนต์ โรบอทส์ ซิติเซ่นส์
ผลงานของ อาจารย์ ดร.กาญจนพันธุ์ สุขวิชชัย และนายธีรธัช อริยชาติผดุงกิจ ภาควิชาวิศวกรรมไฟฟ้า
ปัจจุบันการดึงดูดผู้ชมให้เข้าชมงานนิทรรศการหรือกิจกรรมในรูปแบบต่างๆ นับเป็นจุดประสงค์สำคัญของผู้จัดงาน ซึ่งการใช้หุ่นยนต์นับเป็นอีกหนึ่งวิธีที่จะเรียกความสนใจให้ผู้เข้าชมงานได้ดี การพัฒนาหุ่นยนต์ทรงตัวเองบนลูกบอล เป็นการนำความรู้ด้านวิศวกรรมศาสตร์ประยุกต์ใช้ในการทำงานจริง
หุ่นยนต์ทรงตัวเองบนลูกบอลต้นแบบที่ใช้งานจริงในปัจจุบัน ได้มีการพัฒนาต่อยอดมาจากหุ่นยนต์รุ่นแรก ๆ ให้มีความสวยงามและมีขนาดใหญ่ขึ้น พร้อมมีการติดตั้งระบบสื่อสารไร้สาย และระบบฝังตัวลินุกซ์ เพื่อให้หุ่นยนต์สามารถส่งภาพจากกล้องหน้าหุ่นยนต์มายังคอมพิวเตอร์หลัก เพื่อแสดงภาพขณะที่หุ่นยนต์ทำงานอยู่และส่งข้อมูลการเคลื่อนที่กลับไปยังหุ่นยนต์เพื่อให้หุ่นยนต์สามารถเคลื่อนที่ไปยังทิศทางที่ต้องการได้ - เครื่องคัดเกรดด้วยเกณฑ์น้ำหนัก
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.ชัยยากร จันทร์สุวรรณ์ และนางสาวศิวกาญจน์ แจ่มสุข ภาควิชาวิศวกรรมเครื่องกล
เครื่องคัดเกรดด้วยเกณฑ์น้ำหนัก เป็นเครื่องจักรที่มีขนาดเล็ก ใช้สำหรับงานเกษตรอุตสาหกรรมในขั้นตอนหลังการเก็บเกี่ยวเพื่อคัดแยกผักและผลไม้ เช่น เสาวรส อะโวกาโด เลมอน พลับ ส้ม พริกหวาน เป็นต้น โดยใช้เกณฑ์น้ำหนักในการแบ่งเป็นเกรดต่างๆ เพื่อบรรจุขาย สามารถคัดแยกผัก ผลไม้ในช่วงน้ำหนัก 10-300 กรัม โดยสามารถแยกเกรดผัก ผลไม้ได้มากที่สุดถึง 7 เกรด ชั่งน้ำหนักได้อย่างแม่นยำ ทำงานได้รวดเร็ว ไม่ต่ำกว่า 7,200 ผลต่อชั่วโมง เหมาะกับผู้ประกอบการขนาดเล็กถึงขนาดกลาง สามารถลดค่าใช้จ่ายแรงงานและระยะเวลาในกระบวนการตลอดจนรักษาความสดใหม่ของผัก ผลไม้ก่อนถึงมือผู้บริโภคได้เป็นอย่างดี - เครื่องกายภาพบำบัดแบบสายพานเดินในน้ำ
ผลงานของ รองศาสตราจารย์ ดร.ชวลิต กิตติชัยการ และนางสาวเจษฎาภรณ์ ปริยตากล ภาควิชาวิศวกรรมเครื่องกล
เครื่องกายภาพบำบัดแบบสานพานเดินในน้ำ เป็นเครื่องกายภาพบำบัดที่อาศัยหลักการนำประโยชน์ของแรงลอยตัวของน้ำที่ช่วยพยุงและลดแรงที่กดลงบนข้อเข่า โดยใช้น้ำเป็นสื่อหรือตัวกลางในการบำบัดซึ่งนอกจากจะลดแรงกระแทก และช่วยบรรเทาความเจ็บปวดในขณะฝึกและออกกำลังในน้ำแล้ว ยังช่วยฟื้นฟูสุขภาพทั้งร่างกายและจิตใจของผู้ป่วยที่เป็นโรคต่างๆ ได้อีกด้วย เหมาะสำหรับผู้ที่ได้รับการผ่าตัดข้อเข่าช้ำสำหรับฟื้นฟูสมรรถภาพ และผู้สูงอายุที่ต้องการออกกำลังกาย โดยออกแบบให้ประหยัดพื้นที่และประหยัดน้ำ ปลอดภัยต่อการใช้งาน โครงสร้างแข็งแรง ปรับความเร็วได้ ราคาต่ำกว่าเครื่องนำเข้าจากต่างประเทศ - การพัฒนาชุดควบคุมหุ่นยนต์แขนกลอุตสาหกรรมเคลื่อนที่อิสระ 6 แกน สำหรับการฟื้นฟูสภาพ
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.ชนะ รักษ์ศิริ ภาควิชาวิศวกรรมอุตสาหการ
การพัฒนาชุดควบคุมหุ่นยนต์แขนกลอุตสาหกรรม เคลื่อนที่อิสระ 6 แกน สำหรับการฟื้นฟูสภาพ เป็นการพัฒนาระบบเพื่อต่อยอดในการฟื้นฟูสภาพของหุ่นยนต์เก่าหรือหุ่นยนต์สภาพมือสองในสถานศึกษาหรือภาคอุตสาหกรรม ที่ชุดควบคุมและระบบควบคุมมอเตอร์ได้รับความเสียหายจากการใช้งานมานานให้สามารถใช้งานได้อีกครั้ง เช่น การใช้ในงานเชื่อม การประกอบ การเคลื่อนย้ายวัสดุ และการขึ้นรูป เป็นต้น ซึ่งชุดควบคุมหุ่นยนต์ดังกล่าวสามารถเป็นเครื่องมือในการต่อยอดไปสู่การพัฒนาหุ่นยนต์ 6 แกนที่สามารถใช้ในภาคอุตสาหกรรมได้ในอนาคต - การนำเทคโนโลยีสแกนสามมิติ เพื่ออนุรักษ์สะพานปูนปั้นในกรุงเทพมหานคร
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.คุณยุต เอี่ยมสอาด และนายกิตตินาถ วรรณิสสร ภาควิชาวิศวกรรมเครื่องกล
การอนุรักษ์สะพานปูนปั้นในกรุงเทพมหานครเป็นการอนุรักษ์สะพาน โดยใช้วิธีผสมผสานระหว่างการทำสำเนา 3 มิติแบบดั้งเดิม คือการทำแม่พิมพ์และการหล่อซึ่งเป็นกระบวนการด้านประติมากรรมและแบบที่ใช้เทคโนโลยีด้านคอมพิวเตอร์การสแกนภาพ 3 มิติ ร่วมกับเทคนิคการผลิตซ้ำ โดยใช้การใช้คอมพิวเตอร์ควบคุมการทำงาน เครื่องจักรกลอัตโนมัติ CNC เนื่องจากทั้งสองเทคนิคมีข้อดีและข้อด้อยที่สามารถเสริมกันได้ ซึ่งการอนุรักษ์โบราณวัตถุมีความจำเป็นที่จะต้องเก็บข้อมูลเพื่อการเปรียนเทียบ อ้างอิงในหลากหลายรูปแบบ ทั้งที่เป็นสำเนา 3 มิติ และข้อมูลเสมือนจริง เพื่อเป็นหลักฐานสำหรับศึกษาและการซ่อมแซมที่ถูกต้องในอนาคต
โดยจะมีลักษณะของการบูรณาการความรู้ด้านทัศนคติศิลป์เข้ากับวิศวกรรม เน้นการสำรวจและการศึกษาเฉพาะงานศิลปกรรม ประติมากรรมปูนปั้นประดับสะพาน โดยให้ความสำคัญเรื่องคุณค่า และรูปแบบที่เป็นมรดกทางวัฒนธรรมในส่วนที่ไม่กระทบกระเทือนโครงสร้างของสะพานเท่านั้น - การพัฒนาเครื่องกัด ซีเอ็นซี 5 แกน สำหรับขึ้นรูปชิ้นงานทางทันตกรรมที่มีรูปร่างซับซ้อน
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.ชนะ รักษ์ศิริ และนายตฤณ สังข์ทอง ภาควิชาวิศวกรรมอุตสาหการ
เครื่องกัดซีเอ็นซี 5 แกนสำหรับขึ้นรูปงานทางทันตกรรมที่มีรูปร่างซับซ้อน เป็นการศึกษาและออกแบบขั้นตอนการขึ้นรูปชิ้นงานทางทันตกรรมที่มีความซับซ้อนสูง ด้วยกระบวนการตัดเฉือนโลหะจากเครื่องกัดซีเอ็นซี 5 แกน และเพื่อเป็นเครื่องมือที่สนับสนุนให้การวิจัย และพัฒนาต่อยอดในประเทศทางด้านวัสดุทางการแพทย์ทางทันตกรรมให้มีความสำเร็จมากยิ่งขึ้นต่อไปในอนาคต ซึ่งปัจจุบันกระบวนการที่นิยมมากที่สุดคือกระบวนการขึ้นรูปด้วยการตัดเฉือน แต่เนื่องจากชิ้นส่วนทางทันตกรรมมีขนาดเล็กและมีพื้นผิวที่ซับซ้อน และต้องการความถูกต้องแม่นยำสูง และต้องการความสะอาดในการขึ้นรูปดังนั้น เครื่องจักรที่ใช้กับการผลิตชิ้นส่วนเหล่านี้ต้องเป็นเครื่องเฉพาะทางและมีการเคลื่อนที่ หรือองศาความอิสระ (Degree of Freedom) ในการเคลื่อนที่ที่มากกว่าเครื่องจักรที่ใช้ในอุตสาหกรรมอื่นๆ - การประยุกต์ใช้หุ่นยนต์ เพื่อช่วยเหลือมนุษย์ทางด้านการแพทย์
ผลงานของ อาจารย์ ดร.เชาวลิต มิตรสันติสุข นายสรวิศ สถาพรชัยสิทธิ์ นางสุมนมาศ ดีอินทร์ นายนคร นิรมิตวสุ นายนิพันธ์ สุระพงษ์ นายนวฤกษ์ ประจาค่าย และนายณพล วรชิตชัย ภาควิชาวิศวกรรมไฟฟ้า
แนวโน้มในอนาคตความต้องการที่จะจำหุ่นยนต์มาประยุกต์ใช้เพื่อช่วยเหลืองานมนุษย์มีมากขึ้น โดยเฉพาะด้านการแพทย์ ซึ่งระบบในหุ่นยนต์ต้องมีความปลอดภัยสูง ซึ่งนอกจากจะช่วยในการฟื้นฟูการเคลื่อนไหวของผู้ป่วยแล้ว หุ่นยนต์ยังสามารถเก็บข้อมูลในการทำกายภาพบำบัดแต่ละครั้ง เพื่อช่วยในการวิเคราะห์ของนักกายภาพบำบัดได้อีกด้วย
โดยการประยุกต์ใช้หุ่นยนต์เพื่อช่วยเหลือมนุษย์ทางด้านการแพทย์ ได้พัฒนาให้สามารถลดสัญญาณรบกวนด้วยการไม่ใช้ระบบเซ็นเซอร์ในการวัดค่าแรงภายนอกที่กระทำกับหุ่นยนต์ แต่ได้ใช้การใช้ตัวสังเกตการณ์สัญญาณรบกวนจากตัวกรองคาลมานแทน ทำให้การส่งผ่านแรงสัมผัสระหว่างหุ่นยนต์และมนุษย์มีประสิทธิภาพที่ดียิ่งขึ้น

ยานดำน้ำขับเคลื่อนอัตโนมัติ
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.ยอดเยี่ยม ทิพย์สุวรรณ์ ภาควิชาวิศวกรรมคอมพิวเตอร์

รองเท้าเสริมแรง
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.พงศ์ธร พรหมบุตร อาจารย์ ดร.อรรถพร วิเศษสิทธุ์ อาจารย์ ดร.กรรมมันต์ ชูประเสริฐ และอาจารย์ชาญเวช ศีลพิพัฒน์ ภาควิชาวิศวกรรมเครื่องกล

เครื่องคัดเกรดด้วยเกณฑ์น้ำหนัก
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.ชัยยากร จันทร์สุวรรณ์ และนางสาวศิวกาญจน์ แจ่มสุข ภาควิชาวิศวกรรมเครื่องกล

เครื่องกายภาพบำบัดแบบสายพานเดินในน้ำ
ผลงานของ รองศาสตราจารย์ ดร.ชวลิต กิตติชัยการ และนางสาวเจษฎาภรณ์ ปริยตากล ภาควิชาวิศวกรรมเครื่องกล

การนำเทคโนโลยีสแกนสามมิติ เพื่ออนุรักษ์สะพานปูนปั้นในกรุงเทพมหานคร
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.คุณยุต เอี่ยมสอาด และนายกิตตินาถ วรรณิสสร ภาควิชาวิศวกรรมเครื่องกล

การพัฒนาเครื่องกัด ซีเอ็นซี 5 แกน สำหรับขึ้นรูปชิ้นงานทางทันตกรรมที่มีรูปร่างซับซ้อน
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.ชนะ รักษ์ศิริ และนายตฤณ สังข์ทอง ภาควิชาวิศวกรรมอุตสาหการ

การพัฒนาชุดควบคุมหุ่นยนต์แขนกลอุตสาหกรรมเคลื่อนที่อิสระ 6 แกน สำหรับการฟื้นฟูสภาพ
ผลงานของ ผู้ช่วยศาสตราจารย์ ดร.ชนะ รักษ์ศิริ ภาควิชาวิศวกรรมอุตสาหการ

ประชากรหุ่นยนต์ โรบอทส์ ซิติเซ่นส์
ผลงานของ อาจารย์ ดร.กาญจนพันธุ์ สุขวิชชัย และนายธีรธัช อริยชาติผดุงกิจ ภาควิชาวิศวกรรมไฟฟ้า

การประยุกต์ใช้หุ่นยนต์ เพื่อช่วยเหลือมนุษย์ทางด้านการแพทย์
ผลงานของ อาจารย์ ดร.เชาวลิต มิตรสันติสุข นายสรวิศ สถาพรชัยสิทธิ์ นางสุมนมาศ ดีอินทร์ นายนคร นิรมิตวสุ
นายนิพันธ์ สุระพงษ์ นายนวฤกษ์ ประจาค่าย และนายณพล วรชิตชัย ภาควิชาวิศวกรรมไฟฟ้า