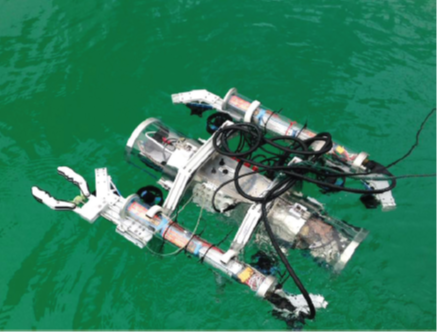
ผู้ช่วยศาสตราจารย์ ดร.ยอดเยี่ยม ทิพย์สุวรรณ์ อาจารย์ภาควิชาวิศวกรรมคอมพิวเตอร์และผู้ช่วยศาสตราจารย์ ดร.ธีรสิทธิ์ เกษตรเกษม อาจารย์ภาควิชาวิศวกรรมไฟฟ้า อาจารย์ที่ปรึกษาทีม พร้อมด้วยนิสิตคณะวิศวกรรมศาสตร์ มหาวิทยาลัยเกษตรศาสตร์ และนิสิตคณะวิศวกรรมศาสตร์จุฬาลงกรณ์มหาวิทยาลัย ทีม Zeabus AUV นำผลงานยานยนต์ใต้น้ำไร้คนขับเข้าร่วมการแข่งขัน Robosub 2016 ณ เมืองซานดิเอโก สหรัฐอเมริกา จัดขึ้นระหว่างวันที่ 21 กรกฎาคม – 3 สิงหาคม 2559 โดยมูลนิธิ AUVSI (Association for Unmaned Vehicle System International) และร่วมสนับสนุนโดยสำนักงานวิจัยทางทหารเรือ ONR (Office of Naval Research) โดยทีมอาจารย์และนิสิตคณะวิศวฯ ได้รับการสนับสนุนจากบริษัท ปตท. สำรวจและผลิตปิโตรเลียม จำกัด (มหาชน) บริษัท Thoresen Thai Agencies (มหาชน) และคณะวิศวกรรมศาสตร์ มก. ในการพัฒนาหุ่นยนต์ใต้น้ำอัตโนมัติเพื่อเข้าร่วมการแข่งขันครั้งนี้
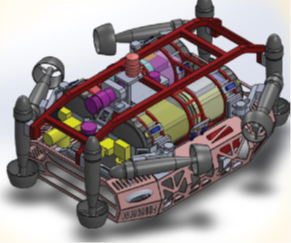
ผู้ช่วยศาสตราจารย์ ดร.ยอดเยี่ยม เล่าว่า “การแข่งขันในครั้งนี้เปิดโอกาสให้นิสิตนักศึกษาจากทั่วโลก ได้สร้างหุ่นยนต์ใต้น้ำอัตโนมัติเพื่อปฏิบัติงานที่ได้รับมอบหมายจากสถานการณ์จริง โดยโจทย์ในการแข่งขันคือ การนำทาง การหลบหลีกสิ่งกีดขวาง และการจัดวางสิ่งของ การนำขยะไปทิ้งให้ตรงเป้าหมาย การรับรู้ถึงรูปร่างและสีของวัตถุ การยิงตอร์ปิโดโดยไร้การควบคุมจากมนุษย์ โจทย์จะแบ่งเป็นข้อย่อยหลายข้อ และต้องทำภารกิจต่อเนื่องเพื่อเก็บแต้ม ทีมที่เก็บแต้มได้มากที่สุดจะเป็นผู้ชนะ ซึ่งในทีม Zeabus AUV มีสมาชิกในหลากหลายวสาขาวิศวกรรม เช่น วิศวกรรมคอมพิวเตอร์ ไฟฟ้า และเครื่องกล โดยทุกคนได้นำความรู้มาประยุกต์ปรับใช้ในการพัฒนาและแก้ไขปัญหาที่เกิดขึ้น แนวคิดของการพัฒนาหุ่นยนต์ของทีม Zeabus AUV ได้คำนึงถึงความแข็งแรง มีน้ำหนักเบา การบำรุงรักษาที่ง่ายและสะดวก ออกแบบโดยใช้โปรแกรม Solid Work
การได้อันดับ 5 ของโลกในครั้งนี้ นอกเหนือประสบการณ์ที่ได้รับจากการแข่งขันแล้ว ทีมยังได้เรียนรู้การพัฒนาวิศวกรรม ระบบพัฒนาความชำนาญในการทำภารกิจ ฝึกการทำงานเป็นทีม ซึ่งสามารถนำไปใช้ในการทำงานต่อไปในอนาคตได้อีกด้วย”
สมาชิกทีม ประกอบด้วย นายวสุธร ศิริยากร นายศุภกฤษฏิ์ เกรียงขจร นางสาวมนปรียา ธรรมวงศ์ นายศฤงคาร พุ่งจันทร์ นายกฤตกร ทรัพย์เย็น นายธนกฤต เตชะเดชวรพันธ์ นายณัฐภณ ประสาททอง และ นางสาวอภิญญา เหลืองอร่ามกุล